Один из экспериментальных дронов с искусственным интеллектом на борту Международной космической станции (МКС) самостоятельно научился передвигаться и ориентироваться в знакомой обстановке, используя при этом одну камеру. На 67 Международном космическом конгрессе в Гвадалахаре были представлены результаты эксперимента.
Несмотря на трудности, дрон 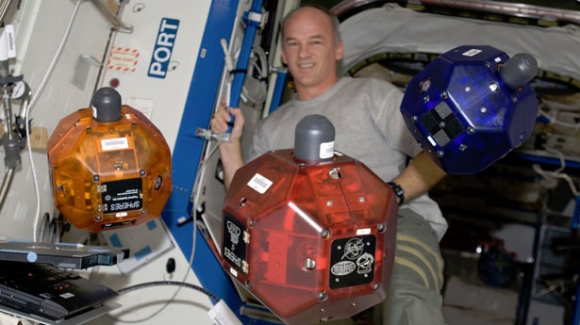 научился летать в космосе. Сначала он с помощью 12 реактивных двигателей на углекислом газе облетел и изучил японский сегмент. Две камеры позволили ему оценить размер объектов и расстояния до них. Человеку сделать это несложно даже с помощью одного глаза, но для робота с обычным программным обеспечением это невозможно.
научился летать в космосе. Сначала он с помощью 12 реактивных двигателей на углекислом газе облетел и изучил японский сегмент. Две камеры позволили ему оценить размер объектов и расстояния до них. Человеку сделать это несложно даже с помощью одного глаза, но для робота с обычным программным обеспечением это невозможно.
Но перед этим сотрудники Делфтского технологического университета с коллегами из ESA протестировали дрон на квадрокоптере в земных условиях.
Затем он мог ориентироваться в том же помещении используя только одну камеру. Это позволила сделать обработанная алгоритмом информация. У устройства были небольшие сложности, связанные с ориентацией в невесомости, но несмотря на это, дрон избежал столкновения со стенами и предметами и обследовал пространство. С помощью этого эксперимента исследователи узнали, что машинное обучение, которое имеет робот, помогает сохранять функции при потери одной из камер.
По словам координатора проекта в ESA Дарио Иццо, в условиях космоса машинное обучение не считается надежным подходом к автономии устройств. Использованные алгоритмы имеют повышенную надежность, чем схожи с программным обеспечением беспилотных автомобилей, где последствия ошибки также могут быть катастрофическими. На разработку ушло пять лет.
SPHERES, разработанный в Массачусетском технологическом институте, представляет собой робота в форме 18-стороннего полиэдра. Его диаметр около 21 сантиметра и массой 4,1 килограмма. В условиях невесомости он проверяет разные технологии, которые необходимы для создания многопрофильных роботизированных космических аппаратов. С 2006 года на МКС три таких дрона выполняют эксперименты научных коллективов . Так же они используются для разработки алгоритмов ориентации, стыковки, осмотра техники. С их помощью проводятся различные физические опыты.